Drone műszaki alapok: bevezető a multikopterek világába
 Mivel a kérés az volt, hogy először a műszaki résszel kezdjük, így ebbe vágok bele in medias res.
Mivel a kérés az volt, hogy először a műszaki résszel kezdjük, így ebbe vágok bele in medias res.
Azt hiszem, egyszer majd csoportosítom is ezeket a bejegyzéseket és akkor szépen rendszerbe szedve is olvashatjátok Őket.
Az UAV-k közül vegyük előre a multikoptereket, ami kezelhetőség szempontjából talán a legjobb választás a témába beleszeretni vágyók számára. Azt, hogy miért van ez így, az alábbi csoportosítási oldalról megtudhatjátok.
Szeretnék visszacsatolni oda, hogy az egész drone kérdésről azért kezdtem el írni, mert a k+f területnek ez egy érdekes iránya lehet és gondoltam, az alkotás folyamatát megpróbálom folyamatában követni és lehetőséget teremteni az olvasónak, hogy akár Ő maga is a folyamat részévé váljon.
Az alábbiakban a műszaki ismereteket szeretném összeszedni, mely közös nyelvet alakít ki és bázisa lehet az ötletelésnek.
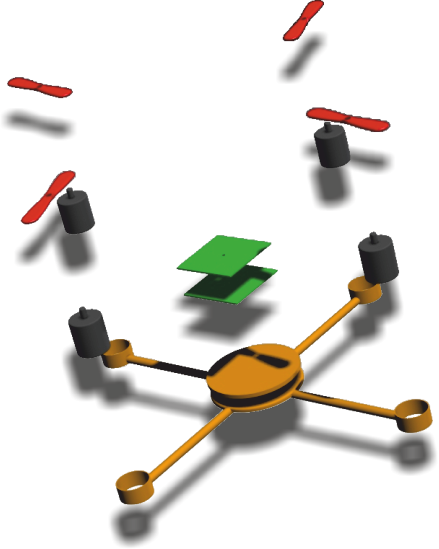
Elsősorban a kis méretű multikopterekről szeretnék beszélni. Ehhez elsősorban a multikopterek felépítését kellene látni. (Lehet, hogy nem minden példányban vannak csak ezek az alkatrészek, illetve hogy néhány alkatrész összemosódik, de alapnak ezeket tekinthetjük)
- váz
- propellerek
- motorok
- sebesség szabályozók (ESC - Electronic Speed Control)
- akkumulátor(-ok)
- vezérlő egység
- Pilóta rendszer (RC/autopilot)
- kábelek, csatlakozók
A további néhány bejegyzésben a fenti sorozatot fogom kifejteni sorról sorra.
OK, akkor itt van az eddig megjelent, a témát taglaló részek
